‘Tuneable tuna’ makes a better robotic swimmer
26 Aug 2021
Giving fish-like robots adjustable tails makes them much more efficient swimmers, scientists in the US have discovered. As well as providing insight into how real fish swim, the researchers say their findings could enable the development of swimming robots that can carry out more complex missions than is possible with current technologies.
Real fish swim efficiently over a wide range of speeds. Biologists have long suspected that this is partly because they actively tune the stiffness of their tails to accommodate different conditions. However, while various evidence hints at such speed-dependent tail stiffening, it is hard to measure it directly, says Qiang Zhong, an engineer at the University of Virginia.
“Fish use muscle to flap their body and also use that muscle to control stiffness,” Zhong explains. “Basically, they use one organ to control stiffness and flap their body, so it is really hard to tell how the muscle plays a role in the body stiffness, because we can’t really isolate that.”
A robot with a spring in its tail
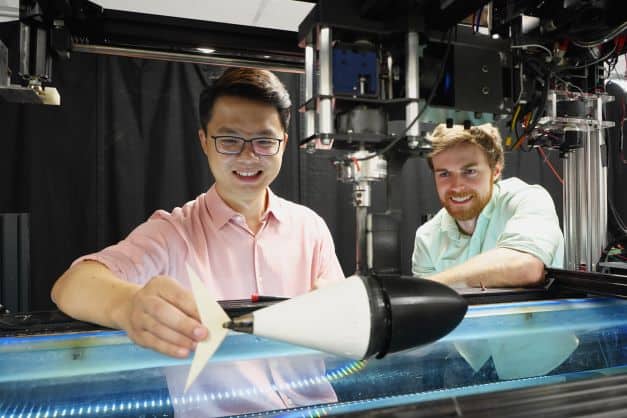
To test the tail-stiffening theory, Zhong and his colleagues decided to build a swimming robot with independently controlled tail stiffness. Their tuna-like robot, which they describe in Science Robotics, has a fixed head and a tail that moves from side to side to provide thrust. At the end of the tail is a joint attached to a passive fin. The stiffness of this joint can be adjusted by tensioning a tendon-like spring; pulling harder on the spring increases torsional stiffness.
When the researchers played around with the stiffness of the robot’s tail joint and combined their findings with mathematical modelling, they found that both swimming speed and efficiency are closely tied to tail stiffness. When the frequency of tailbeats is low, the swimming speed increases in tandem with the frequency. Above a certain frequency, however, the distance travelled with each tailbeat (and thus the robot’s efficiency) starts to drop if tail stiffness remains constant.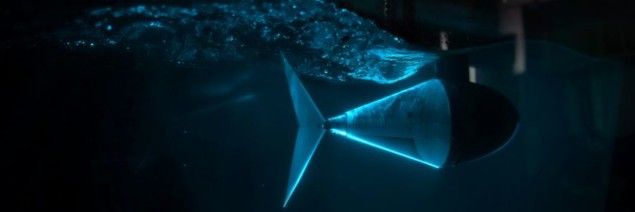 Internal spring A photo of the tuna-inspired robot in the water channel. (Courtesy: Qiang Zhong & Daniel Quinn, University of Virginia)
Internal spring A photo of the tuna-inspired robot in the water channel. (Courtesy: Qiang Zhong & Daniel Quinn, University of Virginia)
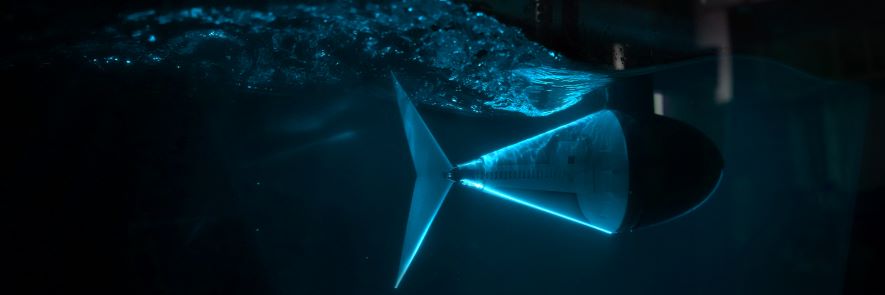 Internal spring A photo of the tuna-inspired robot in the water channel. (Courtesy: Qiang Zhong & Daniel Quinn, University of Virginia)
Internal spring A photo of the tuna-inspired robot in the water channel. (Courtesy: Qiang Zhong & Daniel Quinn, University of Virginia)To maintain the relationship between frequency and speed (and thus keep the robot’s efficiency high), the researchers found that the tail needs to stiffen. Indeed, the relationship between speed and optimal tail stiffness proved remarkably simple: to maximize efficiency, tail stiffness needs to scale with swimming speed – or tailbeat frequency – squared. “If you want to flap your tail twice as fast – twice the frequency – you should pull on that tendon with four times the strength,” says team member Dan Quinn.
Variable missions
While robots with stiff tails are good at swimming fast, Zhong notes that once their tailbeat frequency drops, so does their efficiency. “The benefit of using tuneable tail stiffness is to help the robot always stay at a peak efficiency, as much as possible,” he says. This is important because while real fish are good at multi-speed missions (such as swimming rapidly to a reef and then slowing down to feed), swimming robots are generally “terrible” at them, Quinn adds.
To test the effectiveness of a tuneable tail for this type of mission, the researchers put their robot in a tank with flow speeds that varied from 0.1 to 0.65 metres per second over a period of 15 minutes and directed it to maintain its position by adjusting its tailbeat frequency. When they compared the tuneable tail with tails that were moderately stiff, completely rigid, and fully de-tensioned, they found that the tuneable tail used 16, 41 and 55 per cent less energy respectively. The loose and rigid tails also proved unable to reach the high speeds needed later in the mission.READ MORE
Quinn says that the team’s findings could make it possible to deploy large swarms of small, cheap fish-like robots. Thanks to the multispeed efficiency of their adjustable tails, such robots could be deployed remotely, travel to their mission quickly and then slow down to complete tasks such as climate and environmental measurements or large-scale mapping.
The team are keen to explore how their findings translate to different-sized swimming robots, particularly as their modelling suggests that tuneable tail stiffness becomes more important in bigger fish. Qiang tells Physics World that he would also like to explore advanced ways of controlling stiffness, such as artificial muscle networks. This would enable him to investigate the impact of tuneable stiffness all over the robot’s body, which is likely to be closer to how a real fish behaves.
FROM PHYSICSWORLD.C26/8/2021
Δεν υπάρχουν σχόλια:
Δημοσίευση σχολίου